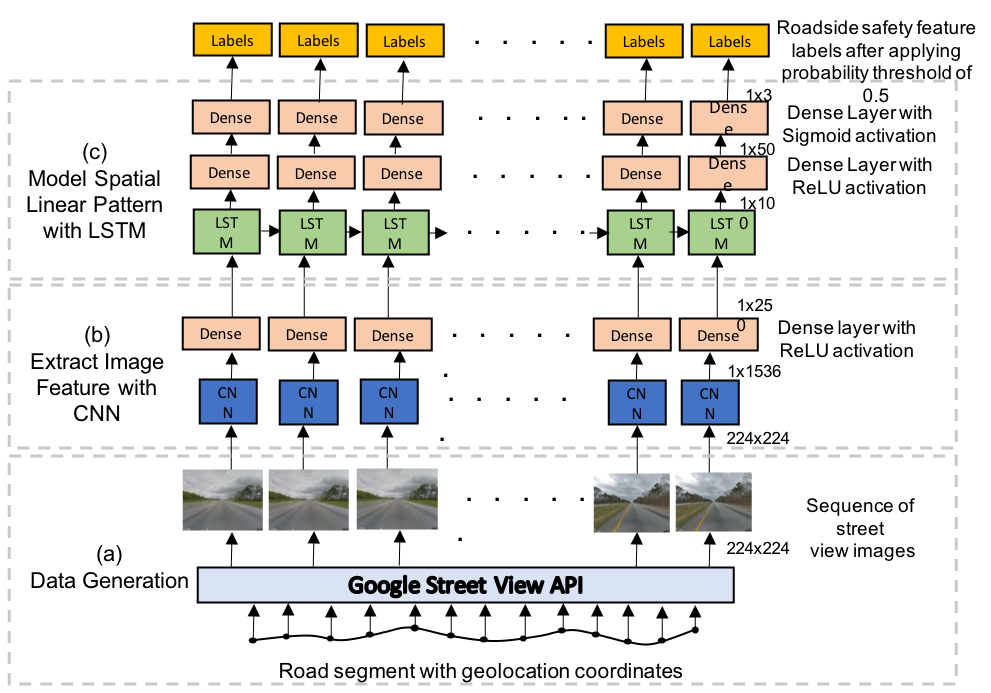
Mapping Road Safety Barriers from Google Street View: Each year, around 6 million car accidents occur in the U.S. on average. Road safety barriers (e.g., concrete barriers, guardrails, rumble strips) help prevent or mitigate the impact of vehicle crashes. Accurate maps of road safety features play a crucial role in highway safety management systems for federal or state transportation agencies. In current practice, road safety barrier mapping is often done manually (e.g., observations on the road or visual interpretation of street view imagery), both expensive and time-consuming. We explore a deep learning approach to automatically map road safety features from street view imagery in this work. We propose to use recurrent network (Long Short-Term Memory) on top of convolutional neural networks to capture the autocorrelation in an image sequence. Evaluations on real-world street view imagery show that our proposed model outperforms several baseline methods.
Mining GPS Bicycle Trajectories on Green Corridors: The project aims to develop effective and efficient spatiotemporal data mining tools that analyze GPS trajectories of urban cyclists to understand their riding behaviors and preferred paths. The topic contributes towards green transportation, which is important for enhancing public health, reducing pollution and greenhouse gas emission. Specifically, the project proposes a K-primary-corridor algorithm that identifies representative paths from cyclists' trajectories. The algorithm involves efficient computational of shortest paths with an upper bound filter based on "trace envelopes". The results were published in InfoSysJ 15.

Traffic Flow Prediction: Traffic flow prediction is of great importance in traffic management and public safety, but is challenging due to the complex spatial-temporal dependencies as well as temporal dynamics. Existing work either focuses on traditional statistical models, which have limited prediction accuracy, or relies on black-box deep learning models, which have superior prediction accuracy but are hard to interpret. In contrast, we propose a novel interpretable spatiotemporal deep learning model for traffic flow prediction. Our main idea is to model the physics of traffic flow through a number of latent spatiotemporal potential energy fields (ST-PEFs), similar to water flows driven by the gravity field. We design a novel spatiotemporal deep learning model for the ST-PEFs. The model consists of a temporal component (temporal autocorrelation and periodicity) and a spatial component (spatial graph convolutions). To the best of our knowledge, this is the first work that make traffic flow prediction based on ST-PEF. Experimental results on real-world traffic datasets show the effectiveness of our model compared over the existing methods. Case studies confirm our model interpretability.
Publications: